com1DFA DFA-Kernel theory¶
Warning
This theory has not been fully reviewed yet. Read its content with a critical mind.
Governing Equations for the Dense Flow Avalanche¶
The governing equations of the dense flow avalanche are derived from the incompressible mass and momentum balance on a Lagrange control volume ([Zwi00, ZKS03]).
Mass balance:¶
Where \(q^{\text{ent}}\) represents the snow entrainment rate.
Momentum balance:¶
We introduce the volume average of a quantity \(P(\mathbf{x},t)\):
and split the area integral into :
\(F_i^{\text{ent}}\) represents the force required to break the entrained snow from the ground and to compress it (since the dense-flow bulk density is usually larger than the density of the entrained snow, i.e. \(\rho_{\text{ent}}<\rho\)) and \(F_i^{\text{res}}\) represents the resistance force due to obstacles (for example trees). This leads to in Eq.4:
Using the mass balance equation Eq.3, we get:
Boundary conditions:¶
The free surface is defined by :
\[F_s(\mathbf{x},t) = z-s(x,y,t)=0\]
The bottom surface is defined by :
\[F_b(\mathbf{x}) = z-b(x,y)=0\]
The boundary conditions at the free surface and bottom of the flow read:
\(\sigma^{(b)}_i = (\sigma_{kl}n_ln_k)n_i\) represents the normal stress at the bottom and \(\tau^{(b)}_i = \sigma_{ij}n_j - \sigma^{(b)}_i\) represents the shear stress at the bottom surface. \(f\) describes the chosen friction model and are described in Friction Model. The normals at the free surface (\(n_i^{(s)}\)) and bottom surface (\(n_i^{(b)}\)) are:
Choice of the coordinate system:¶
The previous equations will be developed in the orthonormal coordinate system \((B,\mathbf{v_1},\mathbf{v_2},\mathbf{v_3})\), further referenced as Natural Coordinate System (NCS). In this NCS, \(\mathbf{v_1}\) is aligned with the velocity vector at the bottom and \(\mathbf{v_3}\) with the normal to the slope, i.e.:
The origin \(B\) of the NCS is attached to the slope. This choice leads to:
Depth averaged equations:¶
In this NCS and considering a prism-like Control volume, the volume content \(V(t) = A_b(t)\overline{h}\) is obtained by multiplication of the basal area of the prism, \(A_b\), with the averaged value of the flow-depth,
Entrainment:¶
The snow entrainment is either due to plowing at the front of the avalanche or to erosion at the bottom. The entrainment rate at the front \(q^{\text{plo}}\) can be expressed as a function of the properties of the entrained snow (density \(\rho_{\text{ent}}\) and snow depth \(h_{\text{ent}}\)), the velocity of the avalanche at the front \(\overline{\mathbf{u}}\) and length \(w_f\) of the front (measured perpendicularly to the flow velocity \(\overline{\mathbf{u}}\)). It obviously only happens on the front of the avalanche:
The entrainment rate at the bottom \(q^{\text{ero}}\) can be expressed as a function of the bottom area \(A_b\) of the control volume, the velocity of the avalanche \(\overline{\mathbf{u}}\), the bottom shear stress \(\tau^{(b)}\) and the specific erosion energy \(e_b\):
This leads in the mass balance Eq.3 to :
The force \(F_i^{\text{ent}}\) required to break the entrained snow from the ground and to compress it is expressed as a function of the required breaking energy per fracture surface unit \(e_s\) (\(J.m^{-2}\)), the deformation energy per entrained mass element \(e_d\) (\(J.kg^{-1}\)) and the entrained snow depth ([FFGS13, SFF+08, Sam07]):
Resistance:¶
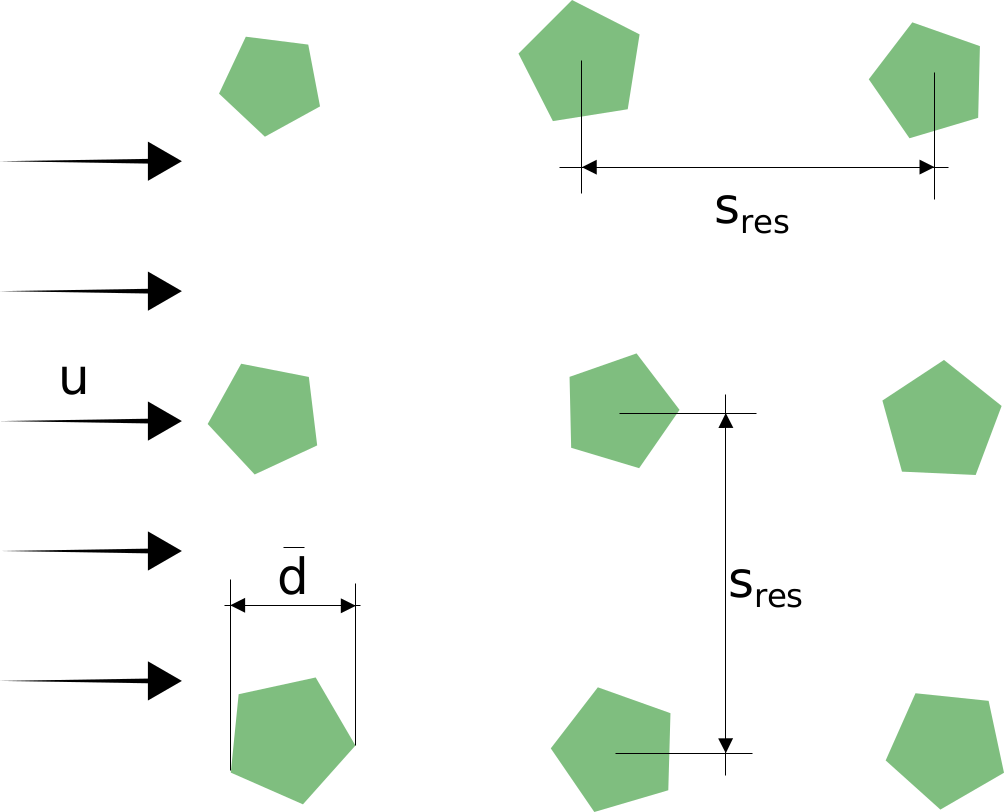
The force \(F_i^{\text{res}}\) due to obstacles is expressed as a function of the characteristic diameter \(\overline{d}\) and height \(h_{\text{res}}\) of the obstacles, the spacing \(s_{\text{res}}\) between the obstacles and an empirical coefficient \(c_w\) (see Fig. 30). The effective height \(h^{\text{eff}}\) is defined as \(\min(\overline{h}, h_{res} )\):
Surface integral forces:¶
The surface integral is split in three terms, an integral over \(A_b\) the bottom \(x_3 = b(x_1,x_2)\), \(A_s\) the top \(x_3 = s(x_1,x_2,t)\) and \(A_h\) the lateral surface. Introducing the boundary conditions Eq.6 leads to:
Which simplifies the momentum balance Eq.5 to:
The momentum balance in direction \(x_3\) (normal to the slope) is used to obtain a relation for the vertical distribution of the stress tensor ([Sam07]). Due to the choice of coordinate system and because of the kinematic boundary condition at the bottom, the left side of Eq.11 can be expressed as a function of the velocity \(\overline{u}_1\) in direction \(x_1\) and the curvature of the terrain in this same direction \(\frac{\partial^2{b}}{\partial{x_1^2}}\) ([Zwi00]):
rearranging the terms in the momentum equation leads to:
Non-dimensional Equations¶
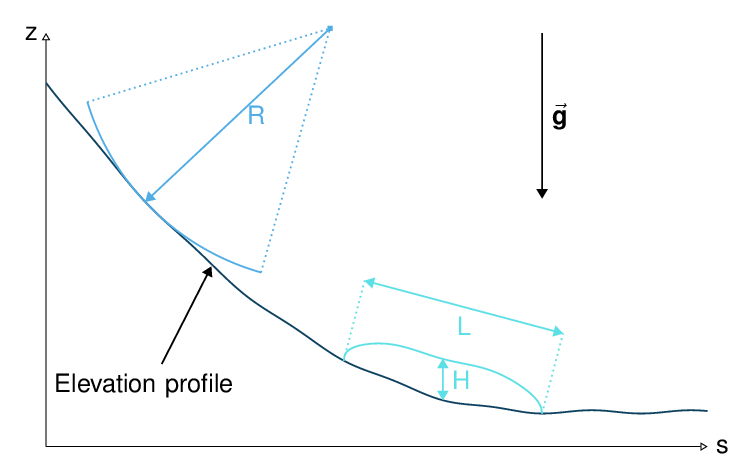
The previous equations Eq.11 and Eq.12 can be further simplified by introducing a scaling based on the characteristic values of the physical quantities describing the avalanche. The characteristic length L, the thickness H, the acceleration due to gravity g and the characteristic radius of curvature of the terrain R are the chosen quantities. From those values, it is possible to form two non dimensional parameters that describe the flow:
Aspect ratio: \(\qquad\qquad\varepsilon = H / L\qquad\)
Curvature: \(\qquad\lambda = L / R\qquad\)
The different properties involved are then expressed in terms of characteristic quantities \(L\), \(H\), \(g\), \(\rho_0\) and \(R\) (see Fig. 31):
The normal part of the stress tensor is directly related to the hydro-static pressure:
The dimensionless properties are indicated by a superscripted asterisk. Introducing those properties in Eq.12, leads to :
The height, H of dense flow avalanches is assumed to be small compared to its length, L. Meaning that the equations are examined in the limit \(\varepsilon \ll 1\). It is then possible to neglect the last term in Eq.13 which leads to (after reinserting the dimensions):
And at the bottom of the avalanche, with \(x_3 = 0\), the normal stress can be expressed as:
Calculating the surface integral in equation Eq.11 requires to express the other components of the stress tensor. Here again a magnitude consideration between the shear stresses \(\sigma_{12} = \sigma_{21}\) and \(\sigma_{13}\). The shear stresses are based on a generalized Newtonian law of materials, which controls the influence of normal stress and the rate of deformation through the viscosity.
Because \(\partial x_1\) and \(\partial x_2\) are of the order of \(L\), whereas \(\partial x_3\) is of the order of \(H\), it follows that:
and thus \(\sigma_{12} = \sigma_{21}\) is negligible compared to \(\sigma_{13}\). \(\sigma_{13}\) is expressed using the bottom friction law \(\tau^{(b)}_i = f(\sigma^{(b)},\overline{u},\overline{h},\rho_0,t,\mathbf{x})\) introduced in Eq.6.
In addition, a relation linking the horizontal normal stresses, \(\sigma_{ii}\), \(i = (1,2)\), to the vertical pressure distribution given by Eq.15 is introduced. In complete analogy to the arguments used by Savage and Hutter ([SH89]) the horizontal normal stresses are given as:
Where \(K_{(i)}\) are the earth pressure coefficients (cf. [Sal04, ZKS03]):
With the above specifications, the integral of the stresses over the flow height is simplified in equation Eq.11 to:
and the momentum balance can be written:
with
The mass balance Eq.10 remains unchanged:
The unknown \(\overline{u}_1\), \(\overline{u}_2\) and \(\overline{h}\) satisfy Eq.15, Eq.16 and Eq.17. In equation Eq.16 the bottom shear stress \(\tau^{(b)}\) remains unknown, and and a constitutive equation has to be introduced in order to completely solve the equations.
Friction Model¶
The problem can be solved by introducing a constitutive equation which describes the basal shear stress tensor \(\tau^{(b)}\) as a function of the flow state of the avalanche.
With
Several friction models already implemented in the simulation tool are described here.
Mohr-Coulomb friction model¶
The Mohr-Coulomb friction model describes the friction interaction between twos solids. The bottom shear stress simply reads:
\(\tan{\delta}=\mu\) is the friction coefficient (and \(\delta\) the friction angle). The bottom shear stress linearly increases with the normal stress component \(\sigma^{(b)}\) ([BSG99, Sam07, WHP04, Zwi00]).
With this friction model, an avalanche starts to flow if the slope inclination is steeper than the friction angle \(\delta\). In the case of an infinite slope of constant inclination, the avalanche velocity would increase indefinitely. This is unrealistic to model snow avalanches because it leads to over prediction of the flow velocity. The Mohr-Coulomb friction model is on the other hand well suited to model granular flow. Because of its relative simplicity, this friction model is also very convenient to derive analytic solutions and validate the numerical implementation.
Chezy friction model¶
The Chezy friction model describes viscous friction interaction. The bottom shear stress then reads:
\(c_{\text{dyn}}\) is the viscous friction coefficient. The bottom shear stress is a quadratic function of the velocity. ([BSG99, Sam07, WHP04, Zwi00]).
This model enables to reach more realistic velocities for avalanche simulations. The draw back is that the avalanche doesn’t stop flowing before the slope inclination approaches zero. This implies that the avalanche flows to the lowest local point.
Voellmy friction model¶
Anton Voellmy was a Swiss engineer interested in avalanche dynamics [Voe55]. He first had the idea to combine both the Mohr-Coulomb and the Chezy model by summing them up in order to take advantage of both. This leads to the following friction law:
This model is described as Voellmy-Fluid [Sal04, Sam07], and the turbulent friction term \(\xi\) is used instead of \(c_{\text{dyn}}\).
SamosAT friction model¶
SamosAT friction model is a modification of some more classical models such as Voellmy model Voellmy friction model. The basal shear stress tensor \(\tau^{(b)}\) is expressed as ([Sam07]):
With
The minimum shear stress \(\tau_0\) defines a lower limit below which no flow takes place with the condition \(\rho_0\,\overline{h}\,g\,\sin{\alpha} > \tau_0\). \(\alpha\) being the slope. \(\tau_0\) is independent of the flow depth, which leeds to a strong avalanche deceleration, especially for avalanches with low flow heights. \(R_s\) is expressed as \(R_s = \frac{\rho_0\,\overline{u}^2}{\sigma^{(b)}}\). Together with the empirical parameter \(R_s^0\) the term \(\frac{R_s^0}{R_s^0+R_s}\) defines the Coulomb basal friction. Therefore lower avalanche speeds lead to a higher bed friction, making avalanche flow stop already at steeper slopes \(\alpha\), than without this effect. This effect is intended to avoid lateral creep of the avalanche mass ([SG09]).